|
|||||
|
|
| 经腋窝无充气后入路腔镜甲状腺手术的“场景化”辅助操作 | |
| 作者姓名: | 孙百慧 余诗桐 葛军娜 魏志刚 雷尚通 |
| 作者单位: | 南方医科大学南方医院 普通外科,广东 广州 510515 |
| 摘 要: |  随着腔镜甲状腺手术的发展及推广,经腋窝腔镜甲状腺手术无疑被证实是一种安全、可行的手术方式。其中,经腋窝无充气后入路腔镜甲状腺手术(GTPET)因无充气干扰的清晰视野,已被广泛接纳并采用。但因其侧面观视角、镜头与器械共用手术空间的特点,使手术操作存在固有难点。  为解决腔镜操作中视角配合问题,有团队应用扶镜机器人,但对于GTPET这种操作范围较小的手术方式,手术视角及操作仍依赖于术者及扶镜手的配合。为克服GTPET操作中的难点,笔者引入“场景化”操作理念,从扶镜手的角度出发,通过三部分规范GTPET手术过程中扶镜手的操作流程。一为手术前准备:规范患者体位摆放及扶镜手位置;二为扶镜手操作要点:概括为“一支点”“二入路”“三平行”;三为“四宫格”法镜下视野场景化辅助操作:将手术区域划分为I~Ⅳ区,据此引导手术操作。 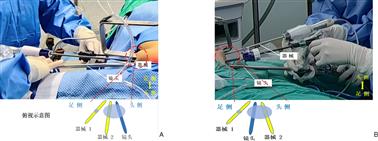 |
| 关 键 词: | 甲状腺切除术 内窥镜 场景 |
| 收稿时间: | 2022-12-29 |
| 修稿时间: | 2023-01-19 |
| 点击此处可从《中国普通外科杂志》浏览原始摘要信息 | |
| 点击此处可从《中国普通外科杂志》下载免费的PDF全文 | |